Raspberry Pi Picoでラジコン制作(Rev#4-2)
2026-05-03 電子工作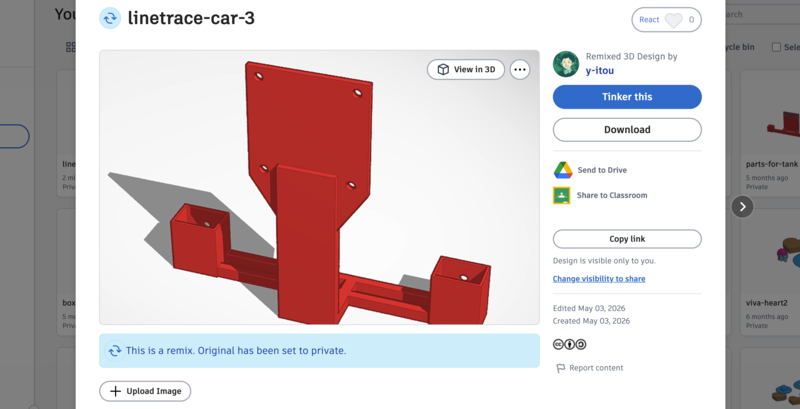
シリーズ化しようと思ってたのに前回からメチャクチャ間が空いてしまいました。IchigoJam(DakeJacket+IchigoDake)搭載の3号機の方が、(需要があるため)進んでます。
自前の半田付けで作っていたセンサーは、量産すると品質にばらつきが大きくなってきたので、Amazonに落ちてたセンサーに切り替えたり、断線しやすい部分をXHコネクタに置き換えてみたりして、改良に取り組んでいます。それに合わせて、3Dの骨格(Tinkercad)もバージョンアップしています。
まだ引っかかっているのが、DCモーターのノイズ問題です。モーターが回る度に、Wi-FiやUSBの接続が切れてしまいます。手元にある本の情報を頼りにバイパスコンデンサを入れてみたのですが、やはりうまくいかないままです。ネットの記事もいくつか見ていますが、使っているモーターに対して必要なコンデンサの容量が違っているのか、まだ解決策に辿り着いていません。その点、IchigoJam(MapleSugar)は対策がバッチリなのか(そもそも複雑な信号を使わないというのも大きいですが)、とても安定しています。
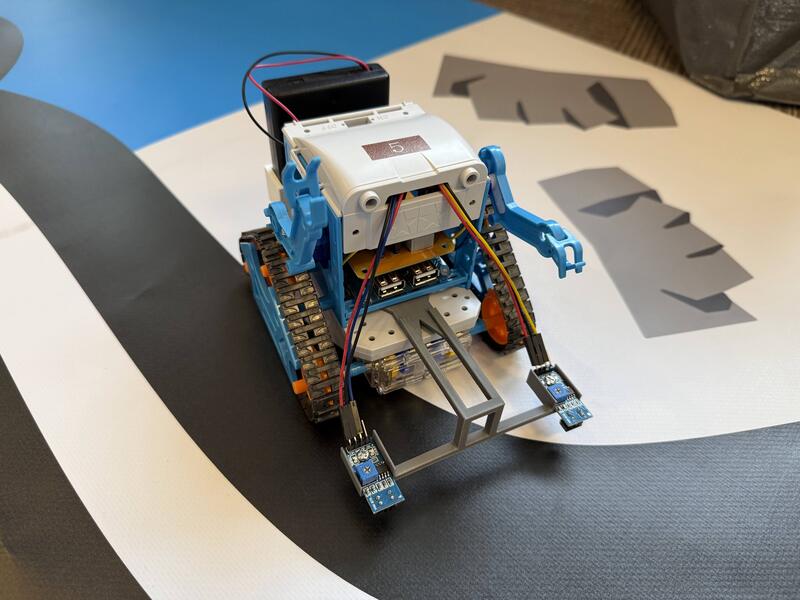
追記(5/6): ページのパス(making-xh-connector)とタイトル(Raspi Picoで...)と中身がバラバラですみません😅かように右往左往しながら進んでおります(ぐるぐる回ってるだけかも?)。下の写真は自作のフォトリフレクタ基板から既製品(Hailege?)に切り替えたバージョンのロボットです。QIコネクタが刺さるようになってるので配線がスッキリしますね(抜けやすい、という注意書きも見かけるのでちょっと様子見ですが)。
しかし、いざ組み上げて走らせると大きな問題が!今度のセンサーでは、床の黒い部分も白判定になってしまいます…。黒い紙で実験してた時はうまく反応してたので油断してました…。そもそも、現行のフォトリフレクタ(LBR-127HLD)でもギリギリで、閾値を950(1024がMAX)とかにセットして動かしていたこともあり、思い切ってコース(ターポリンのシート)の方を改造することにしました。つや消しブラックのスプレーで黒い部分を塗り直しです。
