カムロボバージョンアップ!(Rev#3-5)
2026-04-20 ichigojam 電子工作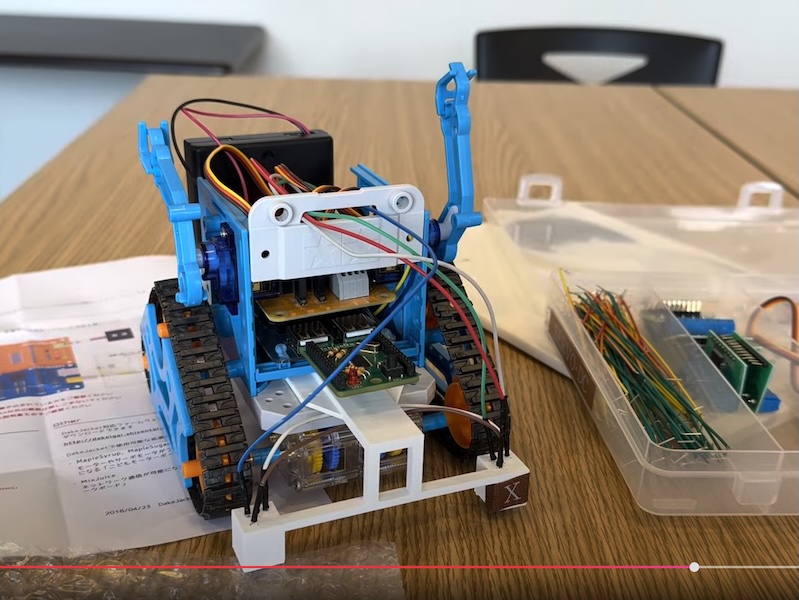
先週末は宮交シティでカムロボを使ったプログラミングの体験イベントを開催させていただきました。出番が増えて忙しいのもとても嬉しいのですが、そろそろギアを切り替えて、ロボコンに出場できるレベルのロボットを一旦作り上げようと思います。
ナチュラルスタイル カムロボ部にある手順に沿って、両腕にサーボモーターを取り付けてみました。これは簡単&良い感じ。7〜8年前に買った古いものを再利用したためか、何台か反応しないモーターが見つかり、買い増しが必要になりましたが、Amazonに安く出回ってるようで、そちらを試しに購入。ライントレース用のセンサーも組み上がったものが色々売られていたので、それも試しに購入してみています(動けばラッキー!くらいの安価なものです)。
こうして何台か同じものを作ってみると、理論と実践の間にあるものに色々と気がつきます。説明書通りに作っているのに動かない、ということが当たり前のように起こります。ジャンパ線など、まさかそこが?という部分に不良が見つかったりもします。こういう障害を一つ一つ乗り越えていくノウハウって、色々応用が効きそうです。
最終ゴールは「ロボコンを開催したい!」なのですが、このままだと、ロボコンにまあ一応出場できそうなロボットが1台組み上がるだけなので、この先の動きを一緒に考えてくれる人がいたらいいなぁ、と妄想したりしています。
4/26追記:
上記はIchigoJam関連のパーツで組み上げたロボットで進めています。IchigoDakeとIchigoDyhookの組み合わせが便利で、電源もWi-Fiも無いような会場でも気楽に出張できるというメリットがとても大きいです。一方で、Raspberry Pi Pico(+MicroPython)でも何台か試作をしています。Raspberry Pi OSに標準で入っているThonnyというエディタから直接プログラムを書き込める簡便さと、(Wを使って)Wi-Fiで母艦となるコンピュータやインターネット上のAPI(流行りに乗るならAIとか)にも連携できる拡張性がメリットと考えています。
そして、RubyKaigiでPicoRubyに触れてしまい、こっちでやってみたくなってきています。MicroPythonよりハードルが高いと個人的には感じているのですが、どうせ登るなら高い山の方が良いかも?!(さらに追記:Rubyではじめる電子工作というピッタリの本が見つかりました。これ買ってやってみよう!)