IchigoDakeでラジコン制作(Rev#3-2)
2025-03-15 ichigojam 電子工作
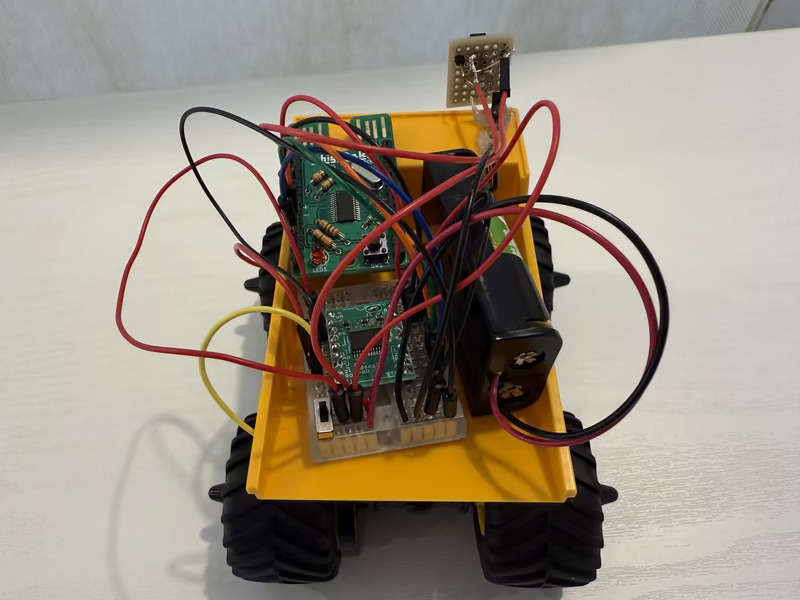
2号機作った後、3号機に着手したものの、すっかり停滞しておりました。ブレッドボードを卒業してユニバーサル基盤で配線を…と考えてのですが、ここが甘かったです。リアルなスパゲティコードが完成…。一発で動いたら良かったんですが、そうはならず、、テスターをどこに当てたらいいのかすら分からなくなる有様で撤退…。
結局、モータードライバ(TB6612)をブレッドボードに置き直して作り直しました(制作時間50分)。ブレッドボードは楽だ…。あと、そもそもこれは3号機でやりたいライントレースの手前の寄り道企画でして、RaspberryPiを一旦離れて、IchigoDake(BASIC)を使っています。BASICも楽だ…。
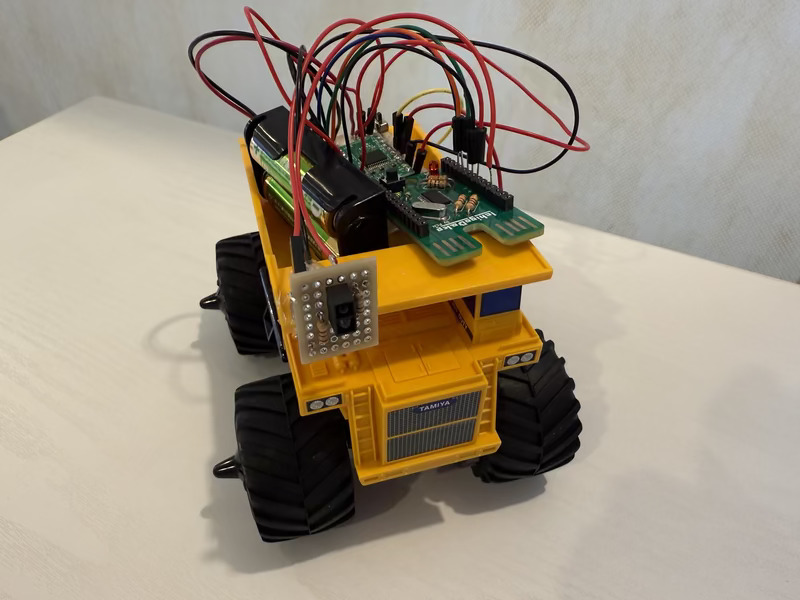
フォトリフレクター(LBR-127HLD)の部分だけユニバーサル基盤を使っています。グルーガンでとりあえず固定。
RaspberryPiでやってたときと違って、単三電池だけで全て賄えるのはありがたいですね。
以下は実際に動作させてみた動画です。
IchogoDakeに入力したプログラムは以下のとおり。@ARUNで自動起動するようにしています。Vの値が300を超える(=障害物を検知する)と1秒停止、1秒逆進、2秒停止して再び前進という動作をします。
1 @ARUN
10 LED1:WAIT30:LED0
20 OUT1,0
30 OUT2,0
40 PWM3,1000
50 V=ANA(2)
60 IF V>300 GOTO100 ELSE OUT1,1
70 WAIT10
80 GOTO50
100 OUT1,0:WAIT60
110 OUT2,1:WAIT60
120 OUT2,0:WAIT120
130 GOTO50