このテキストは2024年の後半からツクレタというスペースで開催している電子工作ワークショップのリファレンス的な資料としてまとめているものです。純粋な電子工作の課題は後半にまとめてあります。IchigoJamという小さなコンピュータを使って、各種のセンサやモーターなど出力装置をコントロールできるようになることを目的としています。
BASICというシンプルな言語を使ってプログラミングの基礎も一緒に学べます。本書ではIchigoDake と IchigoDyhook を組み合わせた環境を想定していますが、その他、普通のIchigoJamなどでも応用できる内容になっているのではないかと思います。
まずは、基本から。
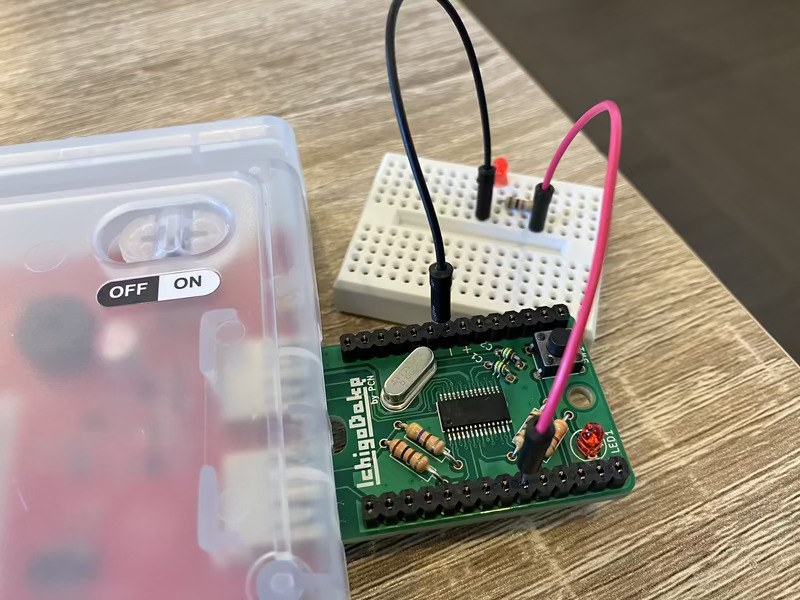
LEDを光らせてみましょう!以下のように「LED1」と入力して、Enterキーを押します。
LED1消す時は数字を0にして、Enterキー。
LED0処理を待ってもらう時は WAIT コマンドを使います。
LED1:WAIT60:LED0LEDが1秒くらい光れば成功です! LEDを点滅させるプログラムを書いてみましょう。
10 LED1:WAIT60
20 LED0:WAIT60
30 GOTO10書き終わったら RUN
と書いてEnterキー入力(またはF5キー)で実行します。止める時はESCキーを押してください。
プログラムを改造する時は LIST
、作ったプログラムを保存する時は SAVE 、読み込む時は
LOAD コマンドを使います。
やってみよう
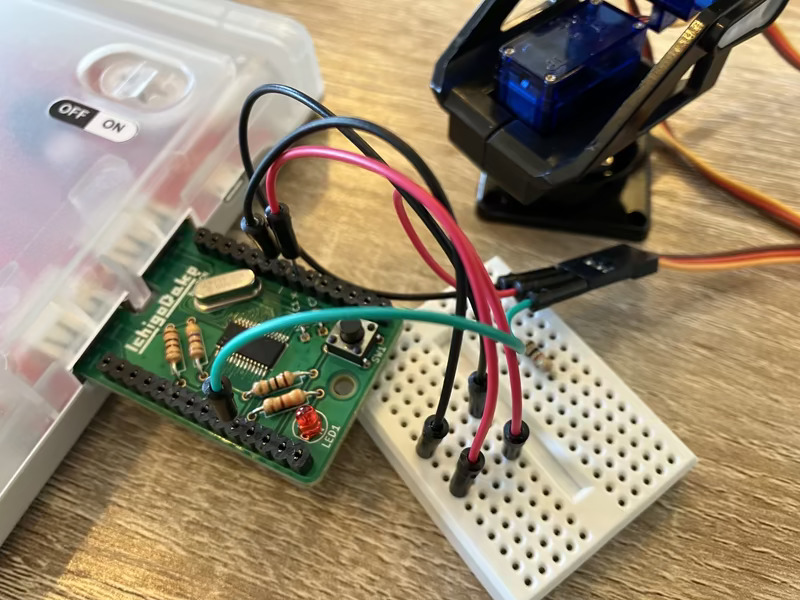
サーボモータとは、指定された通りに正確に位置や移動速度を制御できるモーターのことです。SG90という電子工作ではお馴染みの小さなモータを使用します。写真のように「赤をプラス(+,5V)」、「茶をマイナス(-,GND)」、「黄をOUT2」にそれぞれ接続してください。
IchigoJamで以下のように打ってみましょう。
PWM2,50:WAIT30:PWM2,200「OK」と出て、サーボがギッギッと動いたら、大成功です!最初の数で接続先を指定(2-5)、次の数で角度を指定(50-200)しています。
次は連続して動くプログラムを書いてみます。
10 X=125:D=10
20 CLS:?"PRESS ESC TO STOP"
30 PWM2,X
40 WAIT30
50 X=X+D
60 IF X>200 THEN X=50
70 GOTO30キーボードの操作に合わせて動くプログラムを書いてみます。
10 X = 125
20 CLS
30 K=INKEY()
40 IF K=28 THEN X=X-10
50 IF K=29 THEN X=X+10
60 PWM2, X
70 WAIT30
80 GOTO30書き終わったら「 RUN 」(またはF5キー)で実行!
押されたキーによって、Xの値を加算、または減算して角度を変化させています。
やってみよう
電池ボックスの代わりに、IchigoJamの +(プラス) と -(マイナス) 端子にLED回路をつないでみましょう。点灯が確認できたら、プラス側をOUT1端子に接続します。
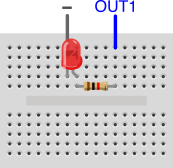
このままでは点灯しませんが、IchigoJam(写真はIchigoDake + IchigoDyhook)に以下のように打ち込んで、Enterキーを押してみてください。LEDが光れば成功です!
OUT1,1LEDを消したい時は以下のように打ち込みます。
OUT1,0次はLEDをもう一色足して2つにしてみましょう。マイナス側は1つめと同じ-(GND)に、プラス側はOUT2に接続します。
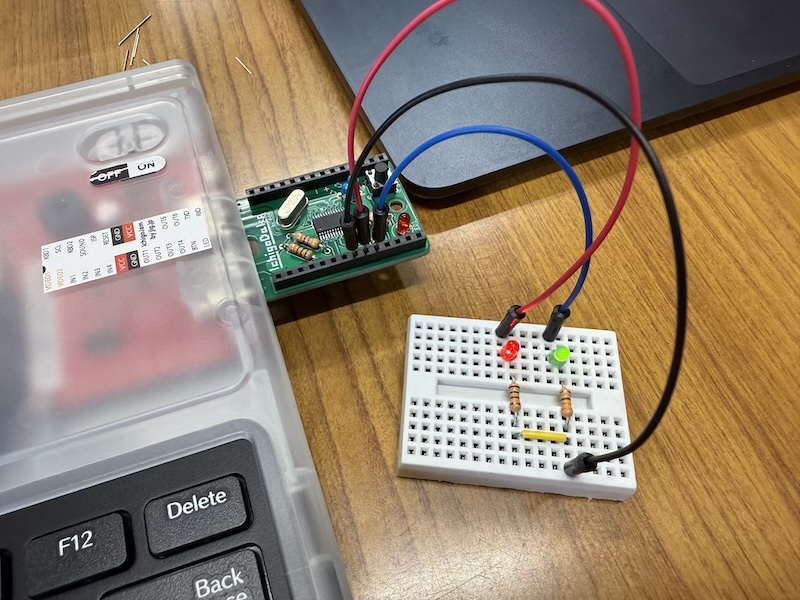
以下のように打ち込んで点灯すればOKです。
OUT2,1消したい時は以下のように打ち込みます。
OUT2,0交互に光らせると信号機みたいになりますね。ちょっと難しくなりますが、本物の信号のように青(緑)から赤に変わる時には点滅もするようにしてみましょう。コードは以下のようになります。
10 OUT1,1:WAIT300:OUT1,0
20 OUT2,1:WAIT300:OUT2,0
30 I=3:WAIT20
40 OUT2,1:WAIT20
50 OUT2,0:WAIT20
60 I=I-1
70 IF I>0 THEN GOTO40
80 GOTO10やってみよう!
フルカラーLEDでも試してみましょう。GND と IchigoJamの - (マイナス) ピンを接続したら、LEDの各端子の色をそれぞれ330Ω(1Kで代用も可)の抵抗を挟んでOUTの2,3,4につなぎます。
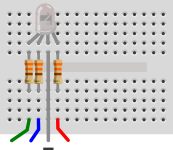
以下のように入力してEnterキーを押すと赤く1秒間ほど点灯するはずです。
OUT2,1:WAIT60:OUT0OUTのすぐ後ろの数字(2)を3,4と書き換えて、それぞれ青,緑に光れば成功です。
OUT3,1:WAIT60:OUT0OUT4,1:WAIT60:OUT0信号機のように色が変わる仕掛けを作ってみましょう。
10 OUT2,1:WAIT180:OUT0
20 OUT3,1:WAIT120:OUT0
30 OUT2,1:OUT4,1:WAIT60:OUT0
40 GOTO10黄色は赤(OUT2)と緑(OUT4)を同時に光らせて作ります。OUTの代わりにPWMコマンドを使うと明るさの微調整も可能です。
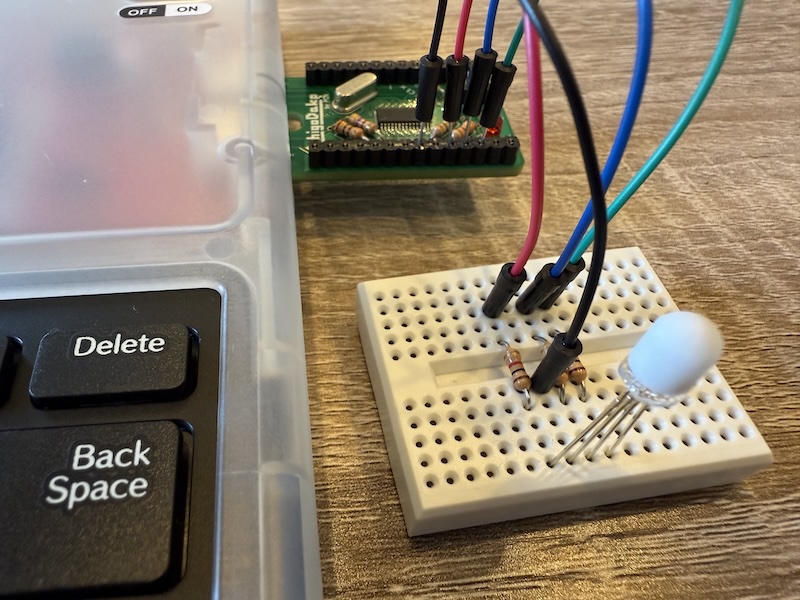
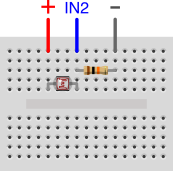
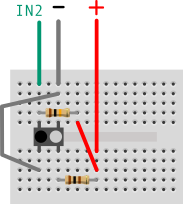
明るさによって抵抗値の変わるフォトレジスタの値を読み込んでみましょう。IN2とVCC,GND端子を使って以下のように回路を組みます。写真の抵抗は10KΩです。
ANAを使って値を読み取ることができます。以下は一秒ごとに表示する例です。
10 V=ANA(2)
20 ?V
30 WAIT60
40 GOTO10
RUNセンサ部分を指で押さえると値が小さくなり、スマホのライトなどをあてると大きくなることが確認できればOKです。
実は、色んな種類のセンサーが売られていて、それぞれ特性は異なりますが同じように使うことができます。
照度センサー(フォトトランジスター) 560nm NJL7502L
照度センサー(フォトトランジスター) 550nm NJL7302L-F5
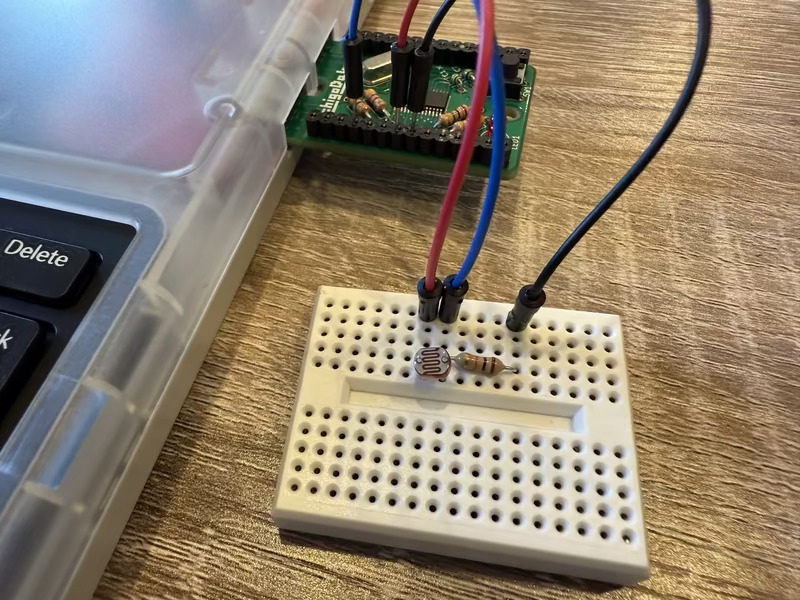
以下の写真は、NJL7302L-F5に差し替えてみたものです。
急にちょっと回路が複雑になりますが、モータードライバと呼ばれるチップを組み合わせることでDCモーターの制御も可能です。以下の写真はTB6612というドライバの接続例です。最大2つのモーターを制御することができますが、ここでは1つだけ接続しています。下段のBO1,B02にモータ、GND,VMに外部電源(単三電池x2)、上段のVCC,GNDをそれぞれIchigoJamの+と-に、BIN1,BIN2,PWMBをOUT1,2,3につなぎます。STBYをプルアップ(ここでは+に接続)することも忘れずに。
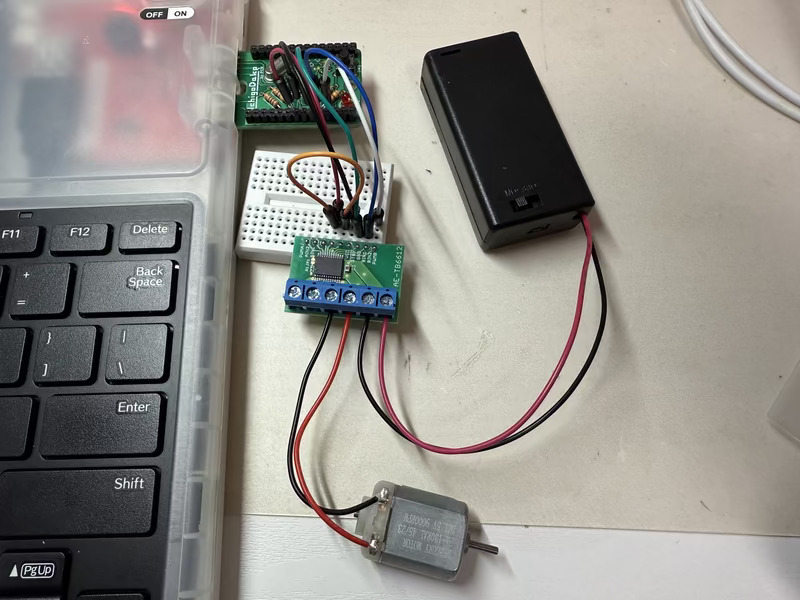
OUT1,0
OUT2,1
PWM3,2000
PWM3,300
OUT2,0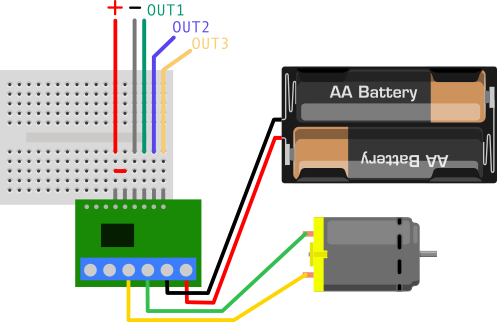
この他にDRV8815というボードも同じような配線で動作させることができました。TC78H653FTGという廉価なチップも試しましたが、こちらはうまく動作させることができませんでした。
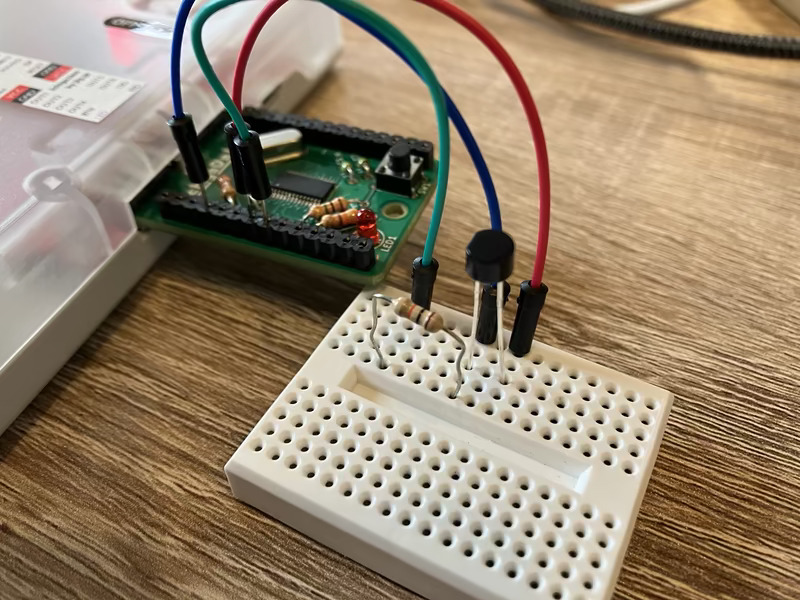
目に見えない赤外線と、それを検知するセンサーを組み合わせた部品もあります。以下の写真はフォトリフレクター(反射型フォトセンサー) LBR-127HLDで回路を組んでみたものです。LED(透明な方)の抵抗は100Ω、リフレクタ(黒光りしてる方)は10KΩです。IchigoJam側のプログラムは上記の明るさセンサーのものをそのまま使ってください。白い紙など特定の(赤外線を反射しそうな)物体を置くとアナログ入力の値が大きくなって、黒い紙などの場合は値が小さいままになります。これを使って白いラインを検出しながら進むロボットカーなどを作ることができます。
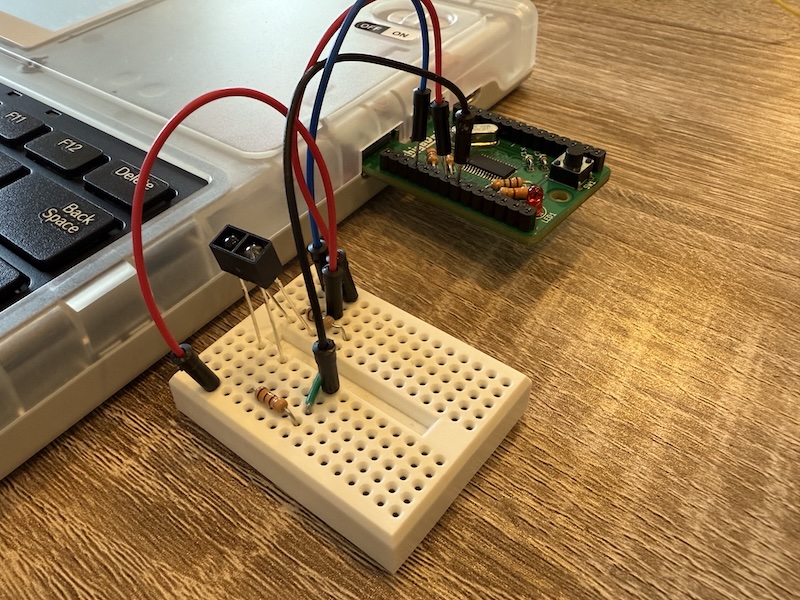
プログラムは「明るさセンサー(フォトレジスタ)」と同じものが使えます。
回路図はこちらのサイトを参考にしました。 LEDとフォトトランジスタ共に極性(つなぐ向き)があるので注意してください。LEDは長い足が「+」、って覚えたのにトランジスタは逆で短い方を「+」にする必要があって、それに気づかずハマりました(;
似たような製品もあります。
前章までで一旦一通りのパーツを使ってみましたので、ここから実際に模型の自動車を走らせるための技を盛り込んでいきたいと思います。
IchigoDakeを車やロボットに載せる場合、RUNコマンドを打つキーボードがない場合があります。そのような時でも、@ARUNというコマンドを先頭行に書いておけば、電源投入時に自動実行されるようになります。
1 @ARUN
10 LED1:WAIT30:LED0もうひとつ、昔ながらのやり方として、IchigoDake上のボタンを押しながら電源を入れるという方法もあります。
モーターとフォトリフレクタを組み合わせて、目の前が明るい時はモーターが回って、暗くなると止まる回路を組んでみましょう!
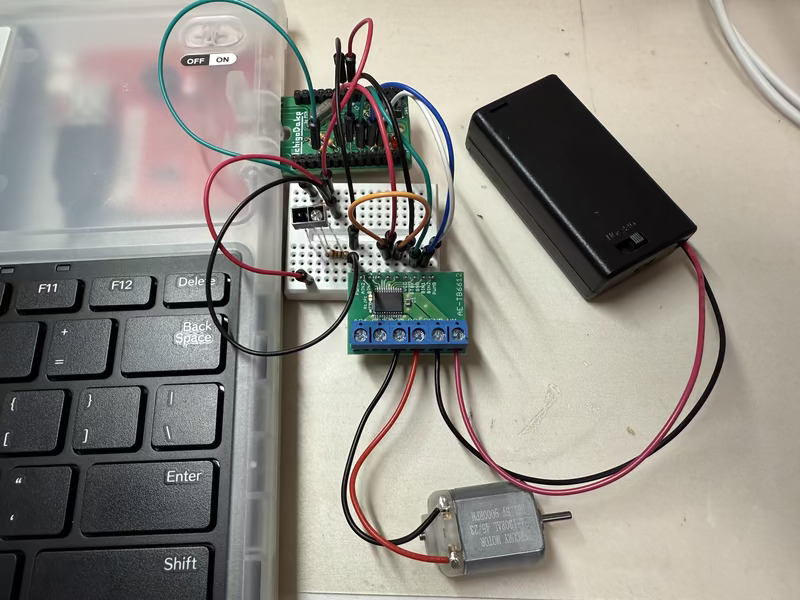
1 @ARUN
10 LED1:WAIT30:LED0
20 OUT1,0
30 OUT2,0
40 PWM3,500
50 V=ANA(2)
60 IF V<500 OUT1,0 ELSE OUT1,1
70 WAIT10
80 GOTO50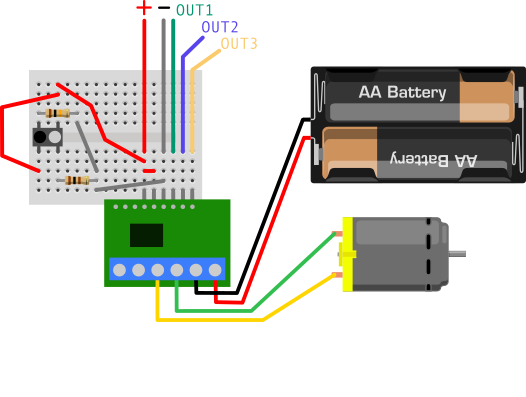
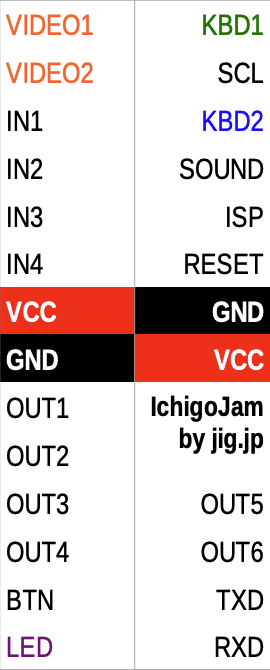
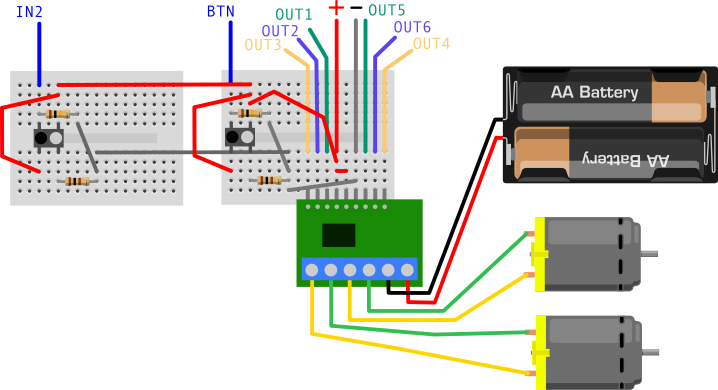
方向転換を可能にするためこれを2セット繋いじゃいましょう!ここまで来るとIchigoJamの入出力端子を使い切ってしまう数になるので、どの番号を使うかが重要です。OUT1,2をAIN1,2に、OUT3をPWMAに割り当て、OUT4をPWMBに、OUT5,6をBIN1,2と非対称にしているのはPWMコマンドの対象が限られているためです。同様に、アナログ入力(ANA)を受け付けられるのも、(OUTを使い切った状態では)IN2とBTNのみなので、ANA(2)とANA(0)を使っています。
1 @ARUN
10 LED1:WAIT30:LED0
20 OUT1,0:OUT2,0:PWM3,1000
30 PWM4,1000:OUT5,0:OUT6,0
40 R=ANA(0):L=ANA(2)
50 IF L<500 OUT1,1 ELSE OUT1,0
60 IF R<500 OUT5,1 ELSE OUT5,0
70 WAIT10
80 GOTO40この例ではOUT1と5しか変化させないため、それぞれのモーターは正転または停止しかできませんが、OUT2,6を操作することで、逆転の動作も可能になります。PWMも1000固定ですが、0から2000の範囲で変化させることで回転速度を制御するのに利用できます。
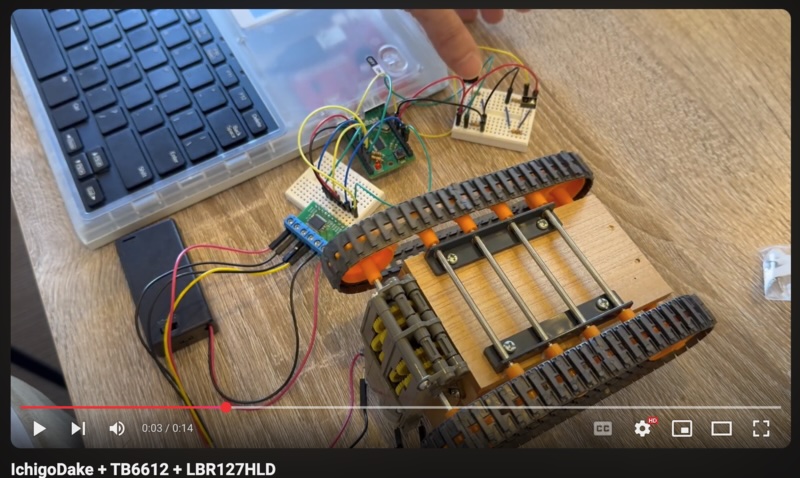
参考リンク: - IchigoJam カムロボを操作しよう! 1 (印刷用) - IchigoJam カムロボを操作しよう! 2 (印刷用) - 動作の様子 on YouTube
ここまでに紹介したIchigoJam電子工作のさらに入門編として実施しているワークショップの内容です。LEDやタクトスイッチ、可変抵抗といった基本的なパーツを使ってパズルのような問題にトライしてみましょう。本書には解答を記載していませんが、リンク先のサイトに実際に組んだ回路の写真を掲載していますので、難しい場合はそちらを参考にしながら進めてください。
まずはウォーミングアップ、LEDを光らせよう!
ボタンが押された時にLEDが光る回路を作ろう!
2つのボタンが「同時に」押されたらLEDが光る回路を作ろう!
2つのボタンの「どちらかが」押されたらLEDが光る回路を作ろう!
赤、青、黄3つのLEDが、それぞれに対応したボタンで光るようにしてみよう!
トグルスイッチでLEDをON/OFFできる回路を作ろう!
2個のトグルスイッチのどちらを動かしてもLEDをON/OFFできる回路を作ろう!
ボタンが押されたらモーターが回る回路を作ろう!
スイッチがONの時に充電、OFFになったらコンデンサからの放電でLEDが光る回路を組んでみましょう!
トランジスタと可変抵抗でLEDの明るさ調整をしてみよう!
フルカラーLEDを赤く光らせてみよう!
フルカラーLEDを緑色に光らせてみよう!
フルカラーLEDを青くに光らせてみよう!
押したボタンによってフルカラーLEDがそれぞれ違う色に光る回路を組んでみよう!
新しいIchigoDakeには、対応キーボードを切り替えるコマンドが入っています!
LRUN3IchigoJamを持っていなくても、ウェブブラウザ上でプログラミングができます!
https://fukuno.jig.jp/app/IchigoJam/
まだ書きかけです!申し訳ありません。ここからワークショップや研修での利用を重ねて徐々にバージョンアップさせていきたいと考えています。
「CC BY 4.0」に則った再利用・再頒布が可能です。本書に関するお問い合わせ、誤字・脱字等のご指摘は同社問い合わせフォームにお寄せ頂ければ幸いです。著者のSNS等に直接メッセージ頂く形でも問題ありません。一部のコードはGitHubに公開してあります。公開できないものは一切なく、ただただ筆者の怠惰によるものですので、「ここの詳細が欲しい」といったご要望があれば是非お寄せください。
著者: ITO Yosei 伊藤陽生 伊藤製作所・株式会社ランバーミル代表。2003年頃からシステム開発に携わっています。Cから始まりJava、JavaScript、Objective-C、PHP、 Python、SQLなどを扱ってきました。現在は主にRubyを業務に用いています。Linuxサーバの構築だったり、ウェブサイトのデザインをしたり、これらの分野の研修講師も時々勤めています。技術の移り変わりの速いこの領域においては、それぞれの経験値そのものよりも、いかに新しい技術にうまくキャッチアップし、チームで共有し、身近な問題の解決に結びつけられるか、という、もう一段抽象的な技能こそが重要なのではないかと考えています。
ここまで目を通してくださりありがとうございます。趣味の延長のような形ではありますが、学校の体験授業などの提供の機会を頂きながら、このような形でこれまでの経験とノウハウを蓄積することができました。
とはいえ執筆には少なくない時間が必要です。当初はこのテキストをepubやPDFに変換し、オンライン書店(AmazonやApple Books)にて販売していましたが、たびたび大幅な改訂が必要になり、そのメンテナンスが追いついていない現状があります。今後、こうした不整合を避けるためウェブに一本化していく予定です(コピーガードなしのepubも配布しています)。もしこの本の情報が何らかの役に立った、という部分があれば、以下のリンクから応援購入を頂ければ幸いです。今後も継続してアップデートを続ける上で大変励みになります。
ご要望や誤字・誤りの指摘などは上記のお問い合わせフォームやSNS等から直接筆者にフィードバックを頂ければ幸いです。
https://buy.stripe.com/bIYbLF7jIdqzaNa146