IchigoDakeでラジコン制作(Rev#3-3)
2025-05-24 ichigojam 電子工作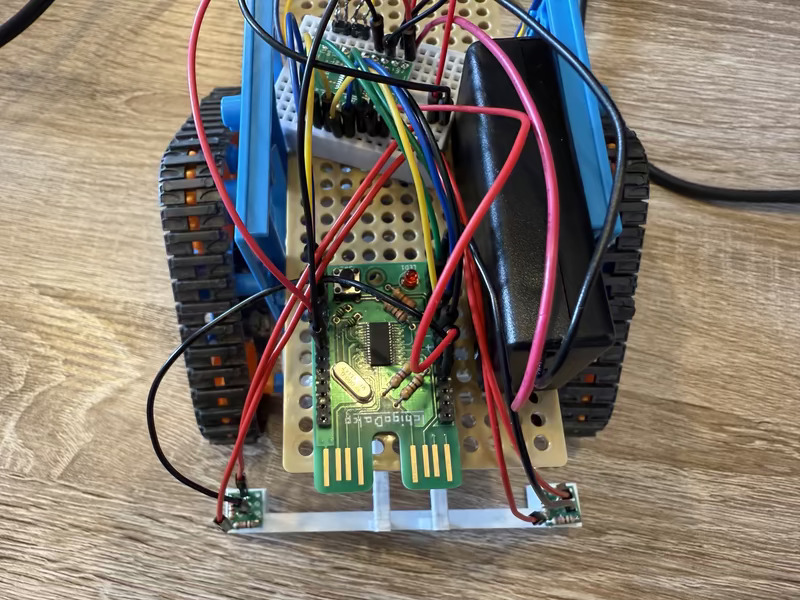
前回、センサー(フォトリフレクタ)1個、モーター1個の制御はうまくいったので、次は本命のライントレースカーを作ってみました。
結局、配線問題が一番大きな課題として残ります。IchigoDakeの場合、リモート接続はできないので、プログラムを書き換えるためには一度配線を外してIchigoDyhookなどのコンソール(?)に繋ぎ直す必要があって手間だな…と考えたところで DakeJacket という製品を発見。オリジナリティを追い求めて色々作ってるつもりが、結局、先人の轍を踏んでいただけという(^^;
1 @ARUN
10 LED1:WAIT30:LED0
20 OUT1,0:OUT2,0:PWM3,1000
30 PWM4,1000:OUT5,0:OUT6,0
40 L=ANA(0):R=ANA(2)
50 IF L>500 OUT1,0 ELSE OUT1,1
60 IF R>500 OUT5,0 ELSE OUT5,1
70 WAIT10
80 GOTO40
※ こちらはTB6612モータードライバーを配線した際のコードです。MapleSugar版はこちら
ユニバーサル基板の表面実装でDCドライバとIchigoDakeを繋ぐ回路を組もうとしたんですが、自分の器用さでは無理!と分かったり、色々(失敗からの)学びの多い期間でもあったと思います。次は何を作ろうかなぁ。
やっぱり2号機みたいにカメラのストリーミングがあるとハイテクな感じがしますし、再びRaspberry Piに戻って、生成AIのAPIなんかと組み合わせて動かしてみるのも面白いかもしれません。