ラズパイでラジコン制作(Rev#2-1)
2024-03-11 linux raspi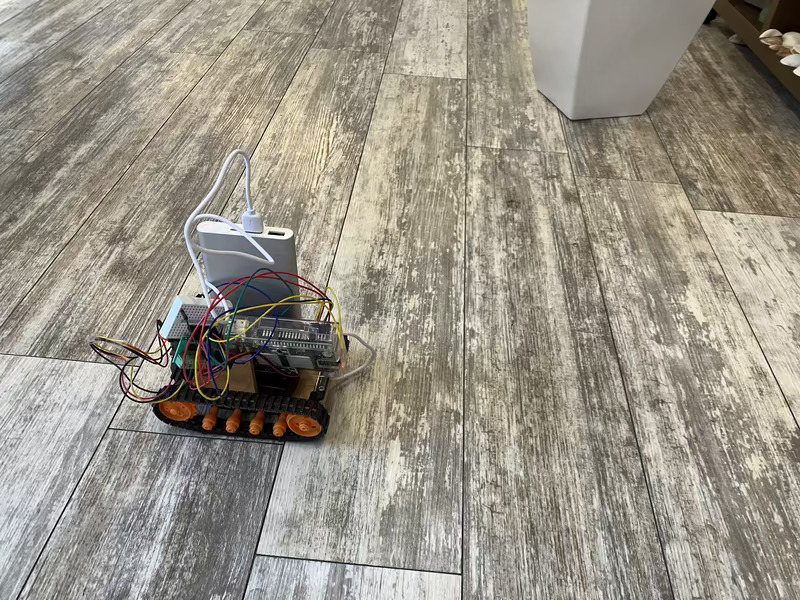
秋月電子通商のTB6612使用 Dual DCモータードライブキットを使ってDCモータを二つ制御するのに利用したコードです。RPi.GPIOよりもpigpioの方が良いと噂されていたので、そちらに乗り換えてみました。
import pigpio, time
# Make sure to enable the daemon: sudo systemctl start pigpiod
class Motors:
def __init__(self):
self.pi = pigpio.pi()
self.pi.set_mode(2,pigpio.OUTPUT) # BIN1
self.pi.set_mode(3,pigpio.OUTPUT) # BIN2
self.pi.set_mode(12,pigpio.OUTPUT) # PWM1
self.pi.set_mode(13,pigpio.OUTPUT) # PWM2
self.pi.set_mode(14,pigpio.OUTPUT) # AIN1
self.pi.set_mode(15,pigpio.OUTPUT) # AIN2
def speed2duty(self,speed):
return int(abs(speed) * 1000000)
def left_wheel(self,speed=1.0):
self.pi.hardware_PWM(12,1000,self.speed2duty(speed))
if speed == 0.0:
self.pi.write(2,0)
self.pi.write(3,0)
elif speed > 0.0:
self.pi.write(2,0)
self.pi.write(3,1)
else:
self.pi.write(2,1)
self.pi.write(3,0)
def right_wheel(self,speed=1.0):
self.pi.hardware_PWM(13,1000,self.speed2duty(speed))
if speed == 0.0:
self.pi.write(14,0)
self.pi.write(15,0)
elif speed > 0.0:
self.pi.write(14,0)
self.pi.write(15,1)
else:
self.pi.write(14,1)
self.pi.write(15,0)
def both_wheel(self,speed=1.0):
self.right_wheel(speed)
self.left_wheel(speed)
def stop(self):
self.pi.stop()
if __name__ == "__main__":
# Test DC motors.
m = Motors()
print("fowrard 3 sec")
m.left_wheel(1)
m.right_wheel(1)
time.sleep(3)
print("stop 1 sec")
m.both_wheel(0)
time.sleep(1)
print("backward left wheel with half speed 1 sec")
m.left_wheel(-0.5)
time.sleep(1)
print("backward right wheel with half speed 1 sec")
m.left_wheel(0)
m.right_wheel(-0.5)
time.sleep(1)
print("stop all")
m.both_wheel(0)
m.stop()
- 実際に動作してる映像(Facebook)
- 初号機
やることリスト
- DCモーター(2個)もバッテリー(USB)から給電できるか?(電池交換が2箇所なのが面倒)
- 配線を綺麗にしたい
- カメラを積んで映像をストリーミングしたい
- Ruby pigpioで書き換えててみる?(この後、sinatraでAPIを組むのが楽になりそう)