YOLOで腕のサインを利用
2025-01-28 python yolo raspi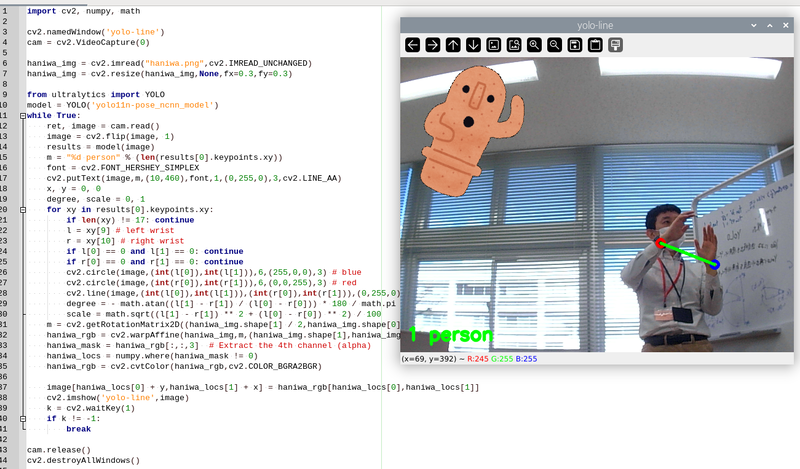
ポーズ推定で得られた特徴点のうち両手首の座標を活用する例です。
右手首と左手首の座標から、両手間の距離と角度を取得し、右上に表示されたハニワの画像を連動して拡大縮小・回転させます。OpenCVとの連携、三平方の定理や三角関数の活用など、高校生にぴったりの内容になってる…はず!
と思って作ったのですが、逆三角関数は大学の範囲ですね。。まあ、Pythonだとatan使えば簡単に求まるので良いかな…。
import cv2, numpy, math
cv2.namedWindow('yolo-line')
cam = cv2.VideoCapture(0)
haniwa_img = cv2.imread("haniwa.png",cv2.IMREAD_UNCHANGED)
haniwa_img = cv2.resize(haniwa_img,None,fx=0.3,fy=0.3)
from ultralytics import YOLO
model = YOLO('yolo11n-pose_ncnn_model')
while True:
ret, image = cam.read()
image = cv2.flip(image, 1)
results = model(image)
m = "%d person" % (len(results[0].keypoints.xy))
font = cv2.FONT_HERSHEY_SIMPLEX
cv2.putText(image,m,(10,460),font,1,(0,255,0),3,cv2.LINE_AA)
x, y = 0, 0
degree, scale = 0, 1
for xy in results[0].keypoints.xy:
if len(xy) != 17: continue
l = xy[9] # left wrist
r = xy[10] # right wrist
if l[0] == 0 and l[1] == 0: continue
if r[0] == 0 and r[1] == 0: continue
cv2.circle(image,(int(l[0]),int(l[1])),6,(255,0,0),3) # blue
cv2.circle(image,(int(r[0]),int(r[1])),6,(0,0,255),3) # red
cv2.line(image,(int(l[0]),int(l[1])),(int(r[0]),int(r[1])),(0,255,0),3) # green
degree = - math.atan((l[1] - r[1]) / (l[0] - r[0])) * 180 / math.pi
scale = math.sqrt((l[1] - r[1]) ** 2 + (l[0] - r[0]) ** 2) / 100
m = cv2.getRotationMatrix2D((haniwa_img.shape[1] / 2,haniwa_img.shape[0] / 2),degree,scale)
haniwa_rgb = cv2.warpAffine(haniwa_img,m,(haniwa_img.shape[1],haniwa_img.shape[0]))
haniwa_mask = haniwa_rgb[:,:,3] # Extract the 4th channel (alpha)
haniwa_locs = numpy.where(haniwa_mask != 0)
haniwa_rgb = cv2.cvtColor(haniwa_rgb,cv2.COLOR_BGRA2BGR)
image[haniwa_locs[0] + y,haniwa_locs[1] + x] = haniwa_rgb[haniwa_locs[0],haniwa_locs[1]]
cv2.imshow('yolo-line',image)
k = cv2.waitKey(1)
if k != -1:
break
cam.release()
cv2.destroyAllWindows()