無限回転サーボ
2023-11-21 電子工作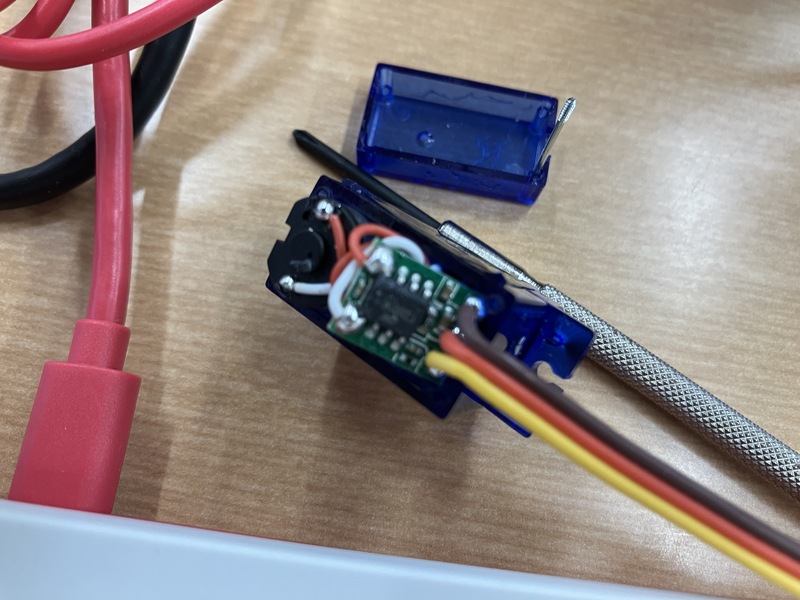
以下のサイトを参考にサーボモータ(SG90 MicroServo)を無限に回転するように改造しました。
| before | after |
|---|---|
|
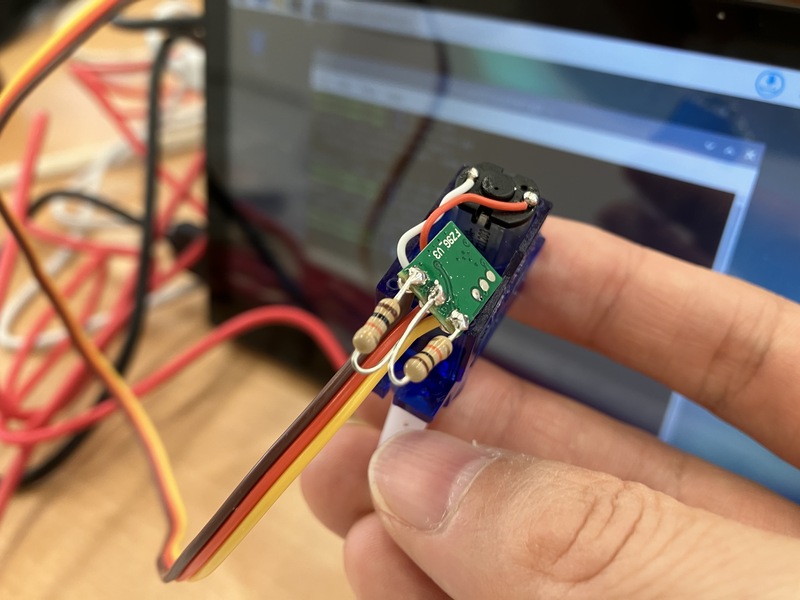 |
RaspberryPi(PWMを4ピン)につないで以下のプログラムを実行します。
import time
import RPi.GPIO as GPIO
GPIO.setmode(GPIO.BCM)
gp_out = 4
GPIO.setup(gp_out, GPIO.OUT)
servo = GPIO.PWM(gp_out, 50)
servo.start(0.0)
c = 6.0
for i in range(20):
print("%.1f" % c)
servo.ChangeDutyCycle(c)
time.sleep(0.5)
c += 0.1
GPIO.cleanup()